The Strano group has pioneered new particle-sized electronic systems that can extend nanoelectronics into traditionally inaccessible locations, combining materials science and electrical engineering. The vision of colloidal robotics is to generate cell-sized, micron-scale machines that can accomplish tasks in otherwise inaccessible locations.
Research Overview
 Extending nanoelectronics into traditionally inaccessible locations using microparticle devices represent an emerging field at the crossing point of materials science and electrical engineering. The ability to interface electronic platforms with the environment addresses several key challenges that we face today (such as remote autonomous sensing and integration of local objects into a global digital network), as well as opening up possibilities for the next generation smart micro-biomedical devices. Colloidal robots are particles capable of functions such as sensing, computation, communication, locomotion and energy management that are all controlled by the particle itself. Their design and synthesis is an emerging area of interdisciplinary research drawing from materials science, colloid science, self-assembly, robophysics and control theory. Many colloidal robot systems approach synthetic versions of biological cells in autonomy and may find ultimate utility in bringing these specialized functions to previously inaccessible locations. Our group has been developing the certain design principles and strategies towards the realization of colloidal robots by theory and experiment.
Extending nanoelectronics into traditionally inaccessible locations using microparticle devices represent an emerging field at the crossing point of materials science and electrical engineering. The ability to interface electronic platforms with the environment addresses several key challenges that we face today (such as remote autonomous sensing and integration of local objects into a global digital network), as well as opening up possibilities for the next generation smart micro-biomedical devices. Colloidal robots are particles capable of functions such as sensing, computation, communication, locomotion and energy management that are all controlled by the particle itself. Their design and synthesis is an emerging area of interdisciplinary research drawing from materials science, colloid science, self-assembly, robophysics and control theory. Many colloidal robot systems approach synthetic versions of biological cells in autonomy and may find ultimate utility in bringing these specialized functions to previously inaccessible locations. Our group has been developing the certain design principles and strategies towards the realization of colloidal robots by theory and experiment.
Collidal Nanoelectronic State Machines based on 2D materials
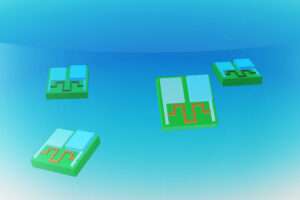
Robots have components that work together to accomplish a task. Colloids are particles, usually less than 100 µm, that are small enough that they do not settle out of solution. Colloidal robots are particles capable of functions such as sensing, computation, communication, locomotion and energy management that are all controlled by the particle itself. Their design and synthesis is an emerging area of interdisciplinary research drawing from materials science, colloid science, self-assembly, robophysics and control theory. Many colloidal robot systems approach synthetic versions of biological cells in autonomy and may find ultimate utility in bringing these specialized functions to previously inaccessible locations. Our group has been working on developing colloidal robotic modules and integrating them through experiments and simulations.
References
High Energy Density Microbatteries for Colloidal Robotics
The recent interest in microscopic autonomous systems, including microrobots, colloidal state machines, and smart dust, has created a need for microscale energy storage and harvesting. However, macroscopic materials for energy storage have noted incompatibilities with microfabrication techniques, creating substantial challenges to realizing microscale energy systems. In this project, we photolithographically patterned a microscale zinc/platinum/SU-8 system to generate the highest energy density microbattery at the picoliter scale. The device scavenges ambient or solution-dissolved oxygen for a zinc oxidation reaction, achieving an energy density ranging from 760 to 1070 watt-hours per liter at scales below 100 micrometers lateral and 2 micrometers thickness in size. The parallel nature of photolithography processes allows 10,000 devices per wafer to be released into solution as colloids with energy stored on board. We demonstrated that such systems can reliably power a micrometer-sized memristor circuit, providing access to nonvolatile memory. We also cycled power to drive the reversible bending of microscale bimorph actuators at 0.05 hertz for mechanical functions of colloidal robots. Additional capabilities, such as powering two distinct nanosensor types and a clock circuit, were also demonstrated. The high energy density, low volume, and simple configuration promise the mass fabrication and adoption of such picoliter zinc-air batteries for micrometer-scale, colloidal robotics with autonomous functions.
Reference
Active Matter and Emergent Behaviors
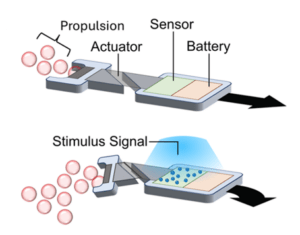
As the power-supply and locomotion of onboard microrobots is highly constrained due to the physically small volume, micro-robotic propulsion performing the role of battery and actuator has emerged. The propulsion mechanism is based on microparticles that convert various forms of energy – chemical, electrical, optical, or acoustic – into mechanical work, compensating for the constrained power supply. These microrobots can dynamically alter their material properties to enhance actuation and flexibility. By exploring simple operational rules, emergent behavior in microrobots can be achieved without complex power, actuation, or computing components. Feedback control involves observing the response of self-propelled devices to environmental stimuli, and research has also focused on microrobot coordination and communication.
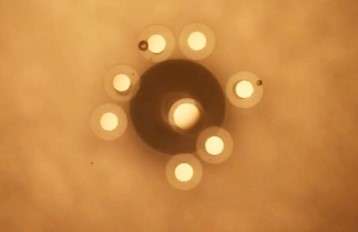
By utilizing the self-organizing properties of simple microparticles’ far-from-equilibrium dynamics, we generate robust electromechanical oscillations without relying on complex systems. We study a low-frequency oscillator that emerges from a collective of active microparticles at the air-liquid interface of a hydrogen peroxide drop. Their interactions transduce ambient chemical energy into periodic mechanical motion and on-board electrical currents. Surprisingly, these oscillations persist at larger ensemble sizes only when a particle with modified reactivity is added to intentionally break permutation symmetry. These emergent oscillations, driven by a thermodynamic mechanism for asymmetry-induced order, provide power for electronic components like microrobotic arms, offering a new strategy for achieving low-frequency oscillations and advancing microrobotic autonomy.